SSCI-581-Week8
GNSS
What is Global Navigation Satellite Systems
- A GNSS is a network of satellites and supporting systems that provide locational data for geolocation
- The modern tool for answering the question: Where Am I?
Global Positioning System
- GPS is the American GNSS:
- First operational GNSS - first satellite launched in 1978
- Created for the military but available to civilians
- Selective Availability
- Only lower resolution available to citizens until 2000/2001
- Military could limit availability as needed but as of 2007 new GPS satellites (GPS III) do not have SA ability
Components of a GNSS
- Space Segment
- Control Segment
- User Segment
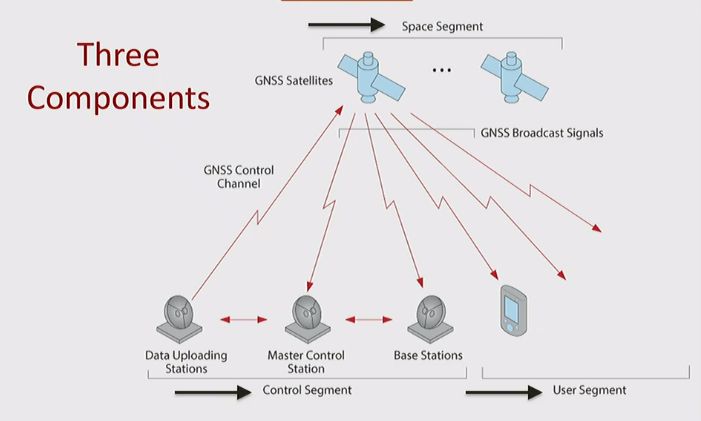
GNSS Control Segment
Monitoring (Base station)
- Track GPS satellites as they pass overhead
- Collect navigation signals, range/carrier measurements, and atmospheric data
- Feed observations to the master control station
- Utilize sophisticated GPS receivers
Processing
- Master Control station
- Provides command and control of the GPS constellation
- Uses global monitor station data to compute the precise locations of the satellites
- Generates navigation messages for upload to the satellites
- Performs satellite maintenance and anomaly resolution, including repositioning satellites to maintain optimal constellation
- Monitors satellite broadcasts and system integrity to ensure constellation health and accuracy
Communicating
- Ground Antennas
- Send commands, navigation data uploads, and processor program loads to the satellites
- Communicate via S-band and perform S-band ranging to provide anomaly resolution and early orbit support
GNSS Satellite Segment
- The satellites in GNSS contain atomic clocks that measure time down to approximately 20-30 nanoseconds (nanosecond = 1 billionth of a second)
- They constantly send out radio signals with their location and the time
Orbit Comparisons
- Satellites farther from earth have longer orbits (distance and time)
- Geosynchronous orbits match earth’s spin (24-hour orbits); return to same spot in sky every 24 hours
- Geostationary orbits are equatorial geosynchronous orbits - stay in same spot in sky always
- Most GNSS satellites are in medium earth orbits (approx. 12-hours; return to same spot in sky twice a day)
GNSS User Segment
Receivers
- Receivers are devices that receive communication from satellites
- They are passive, provide for one-way communication from satellite to receiver only
- Receivers can communicate with various GNSS satellite systems
Satellite Location and Travel Time
- Receivers compare the time of message against its own clock to arrive at travel time of the message
- With location and travel time information from four satellites, it can determine its own location
Smartphones are GNSS Receivers
- Smartphones calculate location using a blend of trilateration based on cell towers and trilateration based on GNSS
The Process of Geolocation with GNSS
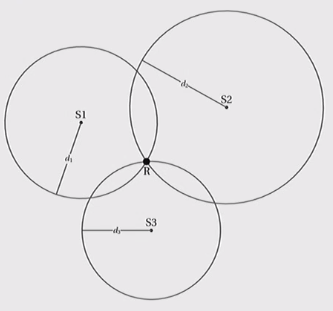
Trilateration
- Trilateration is the determination of a location using s series of distance measurements to other known locations
- If we do not know the location of R, we can figure it out if we know three locations (S1,S2,S3) and R’s distance to them (d1,d2,d3)
The Concept of the Range
- Trilateration is thus all based on the distance measurements between the known locations and the unknown location
- The range is the distance between a receiver and a satellite
- Trilateration with a series of ranges yields a GNSS receiver’s location
Calculating the Range
- With GNSS, we know the time message left a satellite
- The receiver knows the time it received the message
- do a subtract we can get travel time
- The messages travel at the speed of light
- Range = speed of light x travel time
Trilateration in 3D
- We reference the range calculations against a chosen datum (and its ellipsoid)
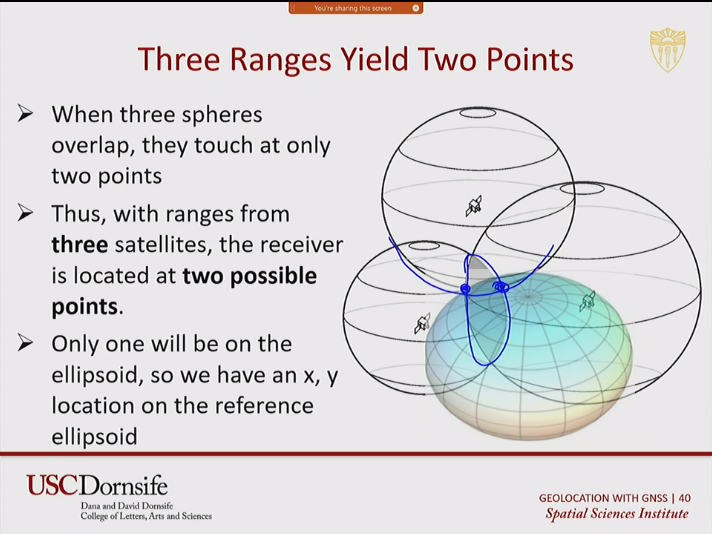
- Three Ranges yields two points, only one will be on the ellipsoid
- Four ranges yields one location, the receiver is fully geolocated, not just on ellipsoid, but with altitude as well

Uncertainty with GNSS
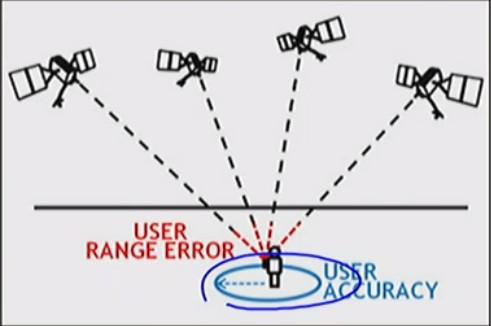
- The calculations of the range is subject to error
- The possibility of error in the range calculations is called uncertainty
- The position of the receiver according the GNSS system at right is somewhere within the blue circle due to uncertainty in the range calculations(red)
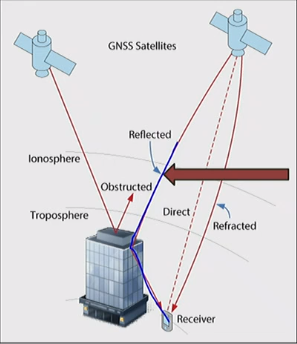
- Sources of Uncertainty
- Ionosphere (5-7m): changed particles can cause refraction of radar signal
- Troposphere (.5m): Changing density of the atmosphere affect the signal
- Components of GNSS: satellite clocks or orbits or receiver noise
- Multipath Error: Ground structures can block signals entirely or reflect signals
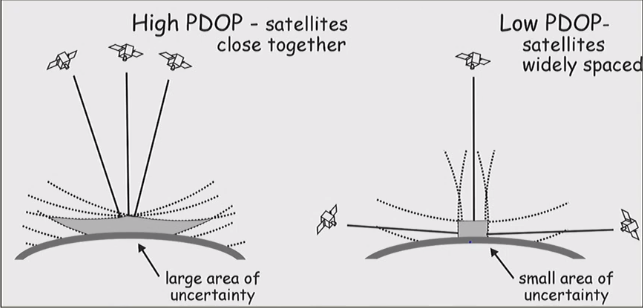
- Range uncertainty from each satellite combine to form the area of possible location
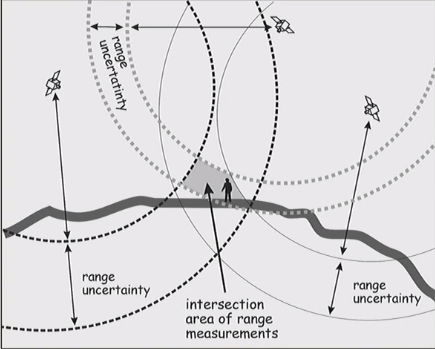
- Positional Dilution of Precision (PDOP) is rated using tetrahedron formed by four most clear satellites. Lower numbers are better
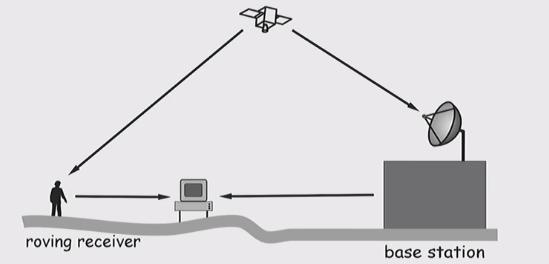
Differential Correction
- Range measurements are compared with simultaneous range measurements from a base station with a known location
- Reading from nearby stations will have suffered similar timing errors, and data is corrected accordingly.
Post-Processed Differential Correction
- Receiver and base station data are transferred to a computer and corrections from base station are applied to receiver data
Real-Time Correction with DGPS or RTK
- DGPS
- User receivers correction information and automatically update position
- Digital correction broadcast over ground-based transmitters
- Good for sea navigation near coast
- RTK
- User receive correction information and automatically updates position from a base station
Satellite-Based Augmentation Systems
- User receives correction information and automatically updates position
- Digital correction broadcast over ground-based transmitters
Remote Sensing: Aerial and Satellite Image
Remotely Sensing Defined
- The science of measuring or inferring the physical properties of an object or medium, using a sensor that is at some distance from the object or medium
- Typically associated with satellites, but many other sensors
Why is Remote sensing Important?
- Provides both high-quality local and global data
- Can show change over time
- Can provide consistent data
- Can identify objects
- Has created a huge archive of geospatial data
- Provides data and measurements not otherwise possible of collecting
- Can provide rapidly updated data
Modern Remote Sensing Systems
- Surface-based: cameras sensing visual light, but also other radiation
- Aerial: high-quality imagery of small areas
- Earth observation orbit: most remote sensing satellites
Components of a Remote Sensing System
- A source of radiation
- Object
- Sensor
- Ground Station
- Analysis and visualization platform
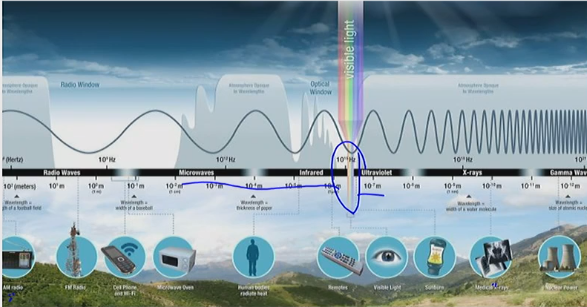
Electromagnetic Radiation (EMR)
Electromagnetic Spectrum
Sensors and Light Energy
- Sensors detect energy in different portions (wavelengths) of the spectrum
- Bands = range of wavelengths; how the light energy is measured and organized
- Cameras and our eyes measure reflected light energy in the red, green and blue bands
- Imaging spectrometers measure light energy within and beyond the visible spectrum
- Most important parts of the EM spectrum for remote sensing are:
- Visible
- Infrared
- Microwave
- All object above 0 degree K emit radiation and can be sensed
EMR and Object Identification
- Objects of the same type yield similar measurements of types and amounts of radiation
- “Objects of the same type” = objects with similar physical and chemical properties
- “Types of radiation” = radiation of particular wavelengths
- “Amounts of radiation” = how much radiation is reflected
- A particular pattern of radiation can therefore be used to identify objects, called its Spectral Signature
Sensors and Systems
- Active Sensors
- Passive Sensors
Altitude of Remote Sensing Systems
- Surface-based: cameras sensing visual light, but also other radiation
- Airborne: high-quality imagery of small areas
- Unoccupied Aerial Vehicles (UAV) are commonly referred to as drones. Allow very low altitude data collection
- Unoccupied Aircraft Systems (UAS) refers to the vehicle as well as the ground control technology and people
- Low Earth orbit
- Satellites: variety of types of imagery over large areas
Imaging vs. Non-Imaging Systems
- For each input, imaging systems record a range of values across the extent of the sensor’s field
- Each input in a non-imaging systems is a single value - i.e. a point - along with the angle at which it was received
- The values of many of the inputs can be put combined to create images
- These include RADAR, LiDAR, SONAR
Light Detection and Ranging(LiDAR) & RAdio DEtection And Ranging & SONAR
- RADAR is primarily active - Passive only when third party transmitter available
- LiDAR is always active - measures three dimensional distance between object and sensor -UV, visible, and NIR
- SONAR is active
Comparison of LiDAR & RADAR
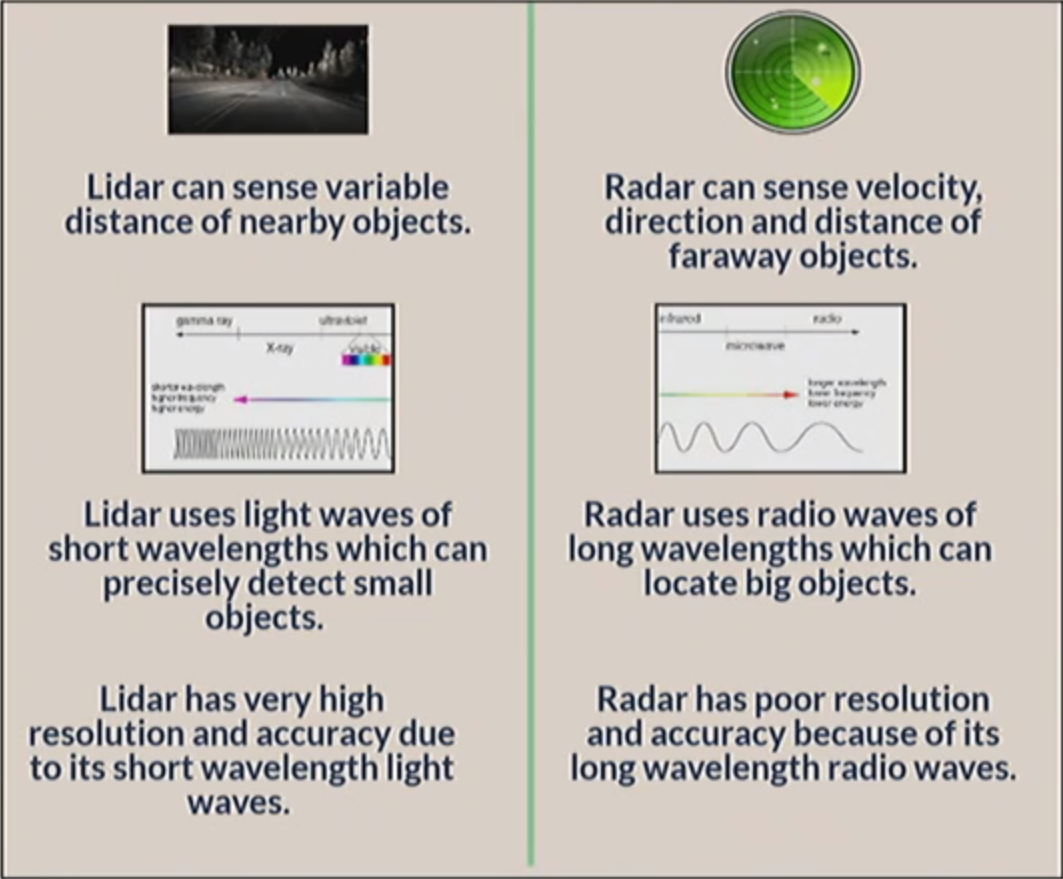 #
#
Remote Sensing and Resolution
Three Types of Resolution
- Spectral Resolution
- Range of wavelength
- Spatial Resolution
- Size of unit
- Temporal Resolution
- Frequency of readings
Spectroscopy
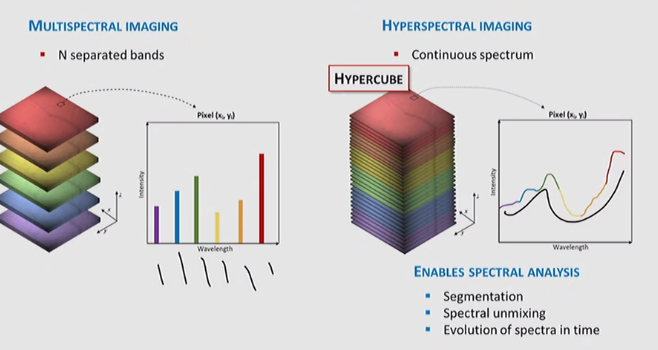
- Each pixel of a remotely sensed image contains many bands of light information from across the spectrum
- Simultaneous acquisition of multispectral bands
- Direct identification of surface materials on a picture-element basis
- But we can also gain more information about features than just what they look like
Spectral Resolution
- Visible light is one portion of the electromagnetic spectrum
- Infrared, NIR, and thermal are also measured with RS sensors
Multispectral vs. Hyperspectral
Spatial Resolution
- Area on the ground covered by each pixel
Temporal Resolution
- Interval between flights over the same area
- Determined by altitude and orbit of the satellite
High Spatial Resolution
- Under 2m = dimension of each pixel
- Limited spectral resolution
- Varying temporal resolutions
- Commercially available: previously just UAV and Aerial platforms
Medium Spatial Resolution
- 2m - 30m
- Global observations of land surfaces
- Revisit 15-20 days (medium temporal resolution)
Low Spatial Resolution
- greater than 30
- Large regions or global
- Daily revisits (high temporal resolution)
Aerial Imagery
Why use Unoccupied Aerial Systems/Vehicles?
- Developments in sensors and miniaturization
- Multispectral, hyperspectral
- Handheld/ease of use
- Researchers/industry need imagery that is flexible, affordable, and high resolution
- UAS have filled this mission space
- Achieve high resolution with increased affordability and flexibility
Aerial Imagery Variations
- Camera Angle
- Sensor
Modern Photogrammetry
- Aerial Photogrammetry - UAVs
- Making measurements from photographs
- Used for survey and mapping
- Close-Range (Terrestrial) Photogrammetry
- Potential for 3D models
Satellite Imagery
- Geosynchronous (or sun-synchronous)
- orbit in synch with the Earth’s rotation
- Meterological purposes
- passes over the same place on the Earth at the same time of day
Constellations
- A group of orbiting satellites
- Global or regional coverage
- Everywhere on earth is visible by at least one satellite OR certain places can be seen very frequently
- Some constellations are steerable
- No longer a trade-off between spatial and temporal resolution and spatial extent
All articles in this blog are licensed under CC BY-NC-SA 4.0 unless stating additionally.
Related Articles

Comment