cs61b-Data Structure
Data Structures
Some Resources
Tree
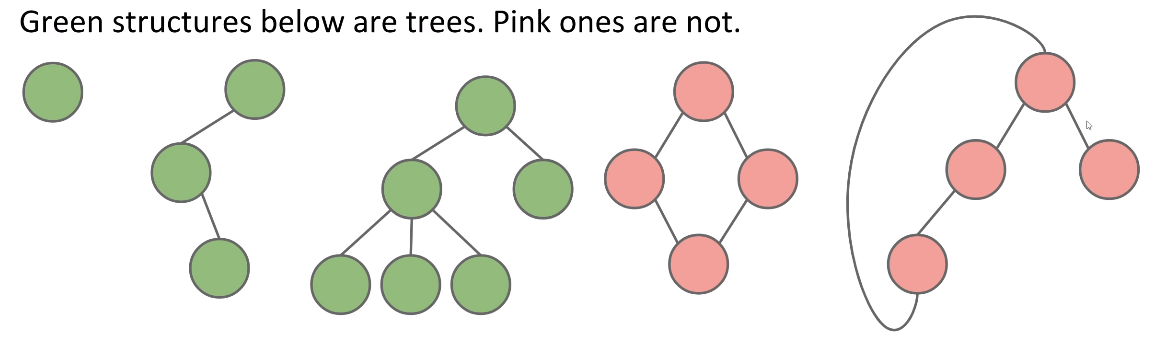
- A tree consists of:
- A set of nodes.
- A set of edges that connect those nodes.
- Constraint: There is exactly one path between any two nodes
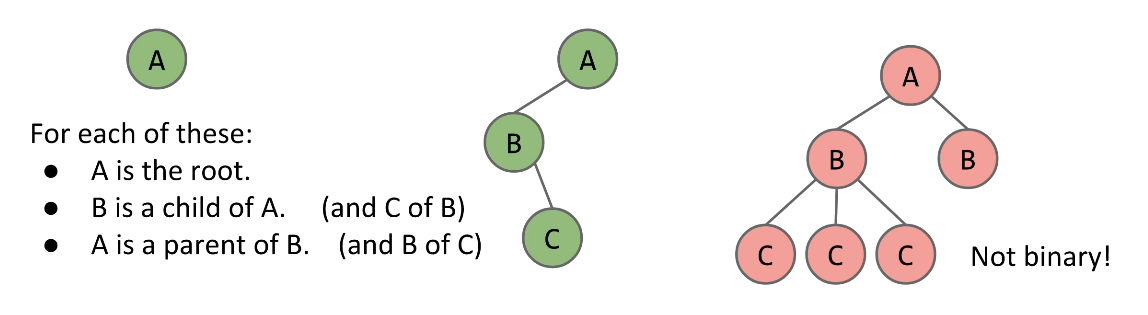
- Rooted Tree and Rooted Binary Trees
In a rooted tree, we call one node the root.- Every node N except the root has exactly one parent, defined as the first node on the path from N to the root.
- A node with no child is called a leaf
In a rooted binary tree, every node has either 1, 0, or 2 children
Tree Traversal
Traversal Orderings
- Level Order
- Visit top-to-bottom, left-to-right
- Depth First Traversals
- 3 types: Preorder, Inorder, Postorder
Depth First Traversals
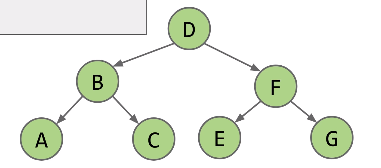
- preOrder (root-left-right)
The result of preOrder for the above tree isD B A C F E G
1 | preOrder(BSTNode x) { |
- Inorder (left-root-right)
the result of preOrder for the above tree isA B C D E F G
1 | inOrder(BSTNode x) { |
- Postorder (left-right-root)
the result of preOrder for the above tree isA C B E G F D
1 | inOrder(BSTNode x) { |
Binary Search Tree (BST)
BST Definition
A binary search tree is a rooted binary tree with the BST property
BST Property. For every node X in the tree:
- Every key in the left subtree is less than X’ key
- Every key in the right subtree is greater than X’s key
Three rules: Complete, Transitive and Antisymmetric.
One consequence of these rules: No duplicate keys allowed!
BST Operations
- Search
- Start at the root and compare it with the search element.
- if
X > element, move on the root’sright child. - if
X < element, move on the root’sleft child. - repeat process recursively until find the item or get to a leaf in which case the tree does not contain the item
1 | static BST find(BST T, Key sk) { |
- Insert
- First, search in the tree for node. If find it, do nothing.
- if don’t find it, we will be at the leaf node, add the new element
1 | static BST insert(BST T, Key ik) { |
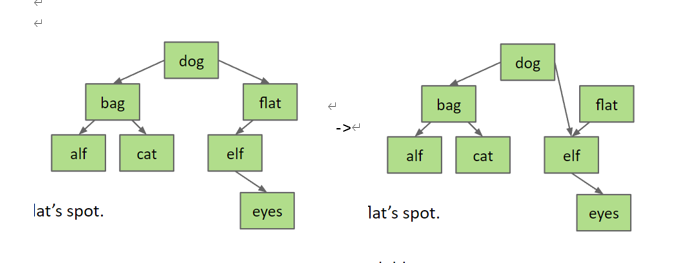
- Delete
Three cases:- no children
It is a leaf, just delete its parent pointer.
Example: delete(“flat”):
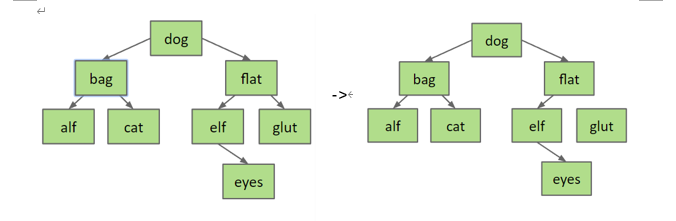
- one children
Reassign the parent’s child pointer to the node’s child.
Example: delete(“flat”):
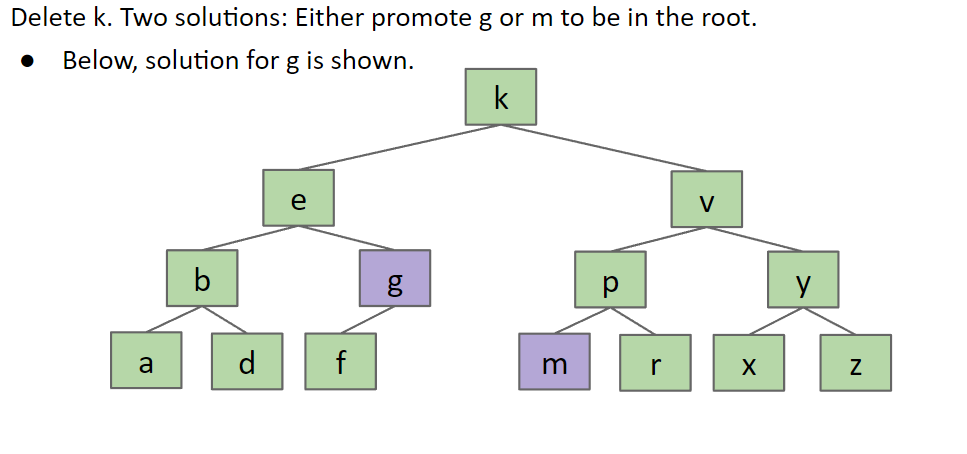
- two children
Two solutions: Use it’s right child’srightestnode or it’s left child’sleftestnode to replace it.
For example: delete k. use ‘g’ or ‘m’ to replace k.
- no children
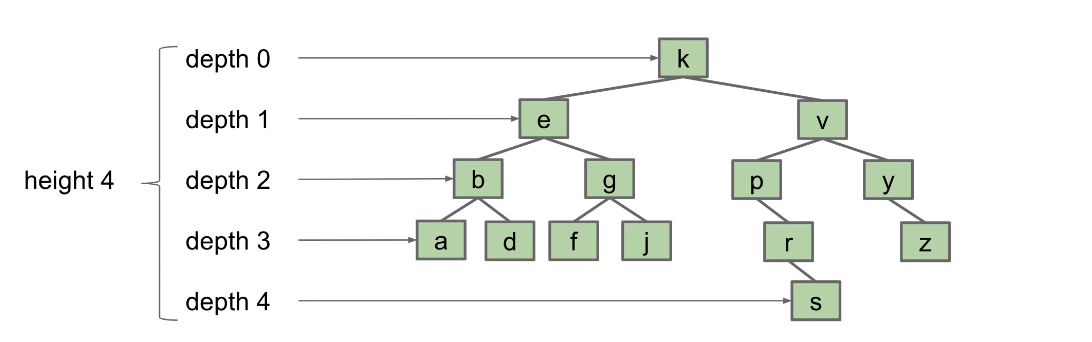
Height and Depth
Height and average depth are important properties of BSTs
- The
depthof a node is how far it is from the root. e.g. depth(g) = 2 - The
heightof a tree is the depth of its deepest leaf, e.g. height(T) = 4 - The
average depthof a tree is the average depth of a tree’s nodes e.g. (0x1 + 1x2 + 2x4 + 3x6 + 4x1) / (1+2+4=6+1) = 2.35
Height abd average depth determine runtimes for BST operations
- The
heightof a tree determines the worst case runtime to find a node.- Example: Worst case is contains(s), requires 5 comparisons (height+1)
- The
average depthdetermines the average case runtime to find a node.- Example: Average case is 3.35 comparisons (average depth + 1).
B-trees / 2-3 trees / 2-3-4 trees
Insertion
To get a balanced (bushy) tree, which will prevent the worst case runtime of N in BSTs, we never add a leaf node. Just add to a current leaf node. Like following figure:
But this idea will degenerate a linked list at last which will lead to a runtime of again.
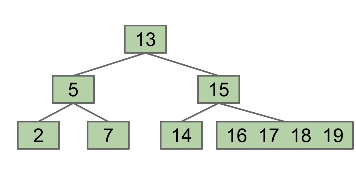
Solution: Set a limit on the number of elements in a single node. Like L = 3. If we add a new element to a node when it already has 3 elements, we will split the node in half by bumping up the middle left node. Like following figure:
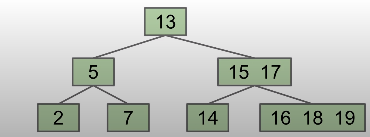
These trees called 2-3-4 or 2-3 trees
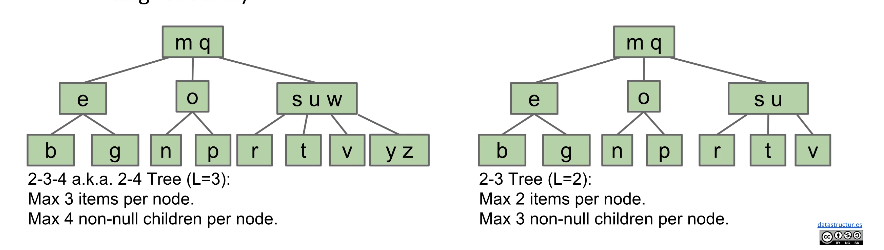
- B-trees of order
L = 3called a2-3-4 treeor a2-4 tree- “2-3-4” refers to the number of children that a node can have. e.g. a 2-3-4 tree node may have 2, 3, or 4 children.
- B-trees of order
L = 2called a2-3 tree
And here is a B-tree Visualization tool can generate the processing of creation of different b trees:https://www.cs.usfca.edu/~galles/visualization/BTree.html
Because of the way B-Trees are constructed, we get two nice invariants:
- All leaves must be the same distance from the source.
- A non-leaf node with k items must have exactly k+1 children
Deletion
LLRB (Left Leaning Red Black Tree)
There are many types of search trees:
- Binary search trees : Can balance using rotation
- 2-3 trees: Balanced by construction (no rotations required)
How about build a BST that is stucturally identical to 2-3 tree?
A 2-3 tree with only 2-nodes is the same as BST. How about three nodes?
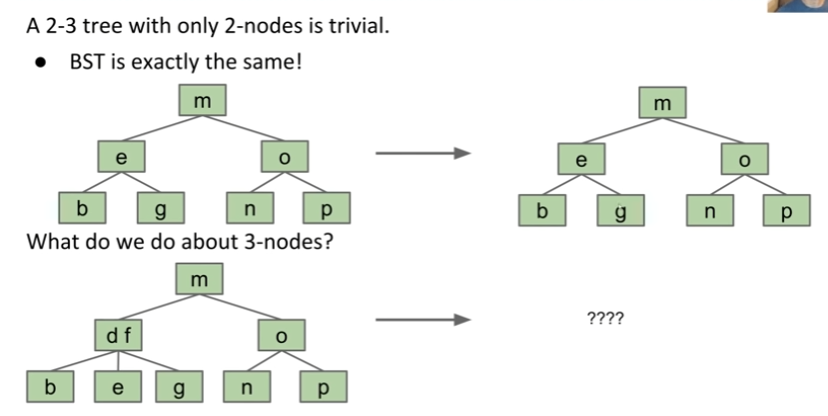
We create a “glue” link with the smaller item off to the left, and mark it as "red"
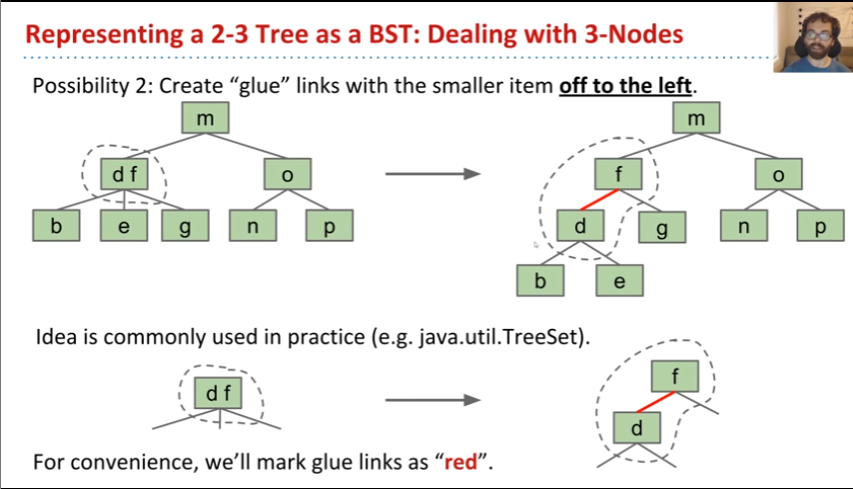
A BST with left glue links that represents a 2-3 trees is often called a “Left Leaning Red Black Binary Search Tree” or LLRB
- LLRBs are normal BSTs!
- There is a 1-1 correspondence between LLRB and an equivalent 2-3 tree.
- The red is just a convenient fiction. Red links don’t “do” anything special.
LLRB Height
Suppose we have a 2-3 tree of height H.
- What is the maximum height of the corresponding LLRB?
- Total height is H(black) + H(red) + 1(red) = 2H +1
LLRB property
- No node has two red links
- Every path from root to a leaf has same number of black links.
LLRB Construction
- Insert as usual into a BST
- Use zero or more rotations to maintain the 1-1 mapping
LLRB Insertion
- We always insert red link
- If there is a right leaning “3-node”, we have a Left Leaning Violation
- Rotate left the appropriate node to fix
- If there are two consecutive left links, we have an Incorrect 4 Node Violation.
- Rotate right the appropriate node to fix
- If there are any nodes with two red children, we have a Temporary 4 Node.
- Color filp the node to emulate the split operation.
Rules and Demo
- Rigth red link -> rotate left.
- Two consecutive left links -> rotate right.
- Red left and red right -> color flip.
Demo: Insert 1-7 to empty LLRB
Hash Table
Start with “DataIndexedIntegerSet”
Suppose we create an ArrayList of type boolean and size 2 billion. Let everything be false by default.
- The
add(int x)method simply sets thexposition in ArrayList to true. - The
contains(int x)method simply returns whether thexposition in ArrayList istrueorfalse
1 | public class DataIndexedIntegerSet { |
Problem of above approach:
- Extremely wasteful. If 1 byte per
boolean, the above needs2GB. And user may only insert handful items. - What do we do if we want to insert a
String?
Solving the word-insertion problem
Now we want to insert the String to the ArrayList, How that works?
Use Integer to represent String
We can use the idea of how number system works:
A four digit number, say 5149, can be written as
Similarly, there are 26 letters in the english lowercase alphabet. We use 26 as the multiplier. And give each letter a number like : Then the "cat" can be represented as:
Code will be like:
1 | public class DataIndexedEnglishWordSet { |
Integer Overflow and Hash code
In Java, the largest possible integer is 2,147,483,647. If you go over this limit, you overflow, starting back over at the smallest integer, which is -2,147,483,648. In other words, the next number after 2,147,483,647 is -2,147,483,648.
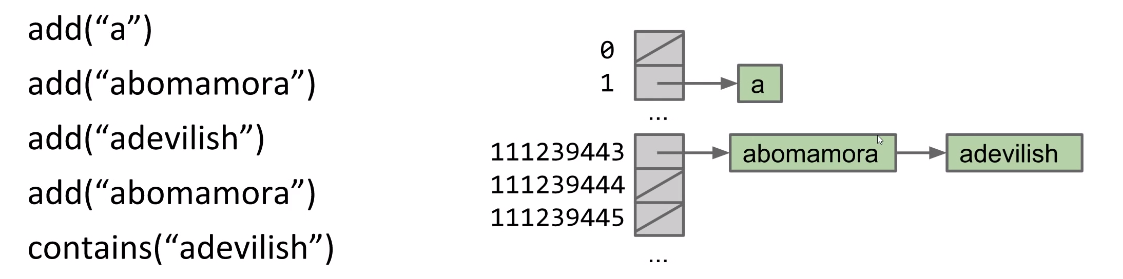
Due to above limitation, we will get wrong number, For example:
- With base 126, we will run into overflow even for short strings.
- “omens” = 28,196,917,171, which is much greater than the maximum integer!
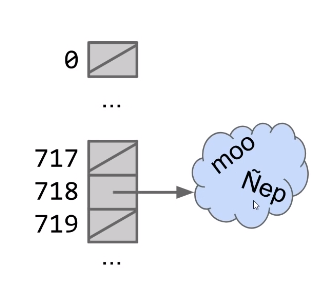
asciiToint('omens')will give us -1,867,853,901 instead. And it can result in collisions like following picture
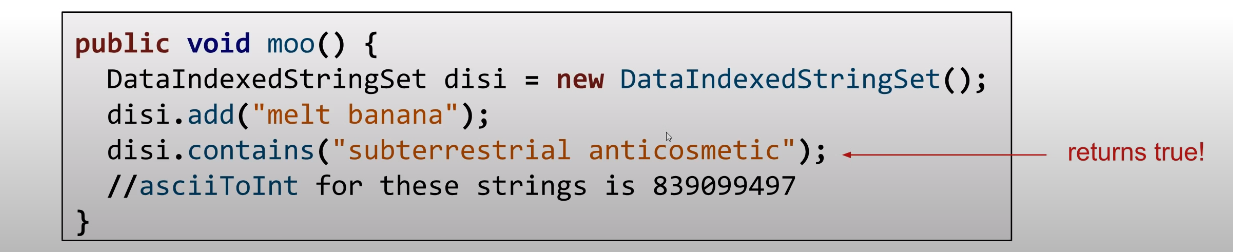
The official explanation of hash code: a hash code “projects a value from a set with many (or even an infinite number of) members to a value from a set with a fixed number of (fewer) members.”
Pigeonhole Principle tell us that if there are more than X possible items (X > container capacity), multiple items will share the same hash code.

Hash Table
Suppose N items have the same numerical representation h, we store a “bucket” of these N item at position h. The implementation of this bucket could use ArrayLists, LinkedList, ArraySet, and ect.
Each bucket in array is initially empty, When an item x gets added at the index h:
- if bucket h is empty, we create a new list containing x and store it at index h
- if bucket h i already a list, we add x to this list if it is not already present.
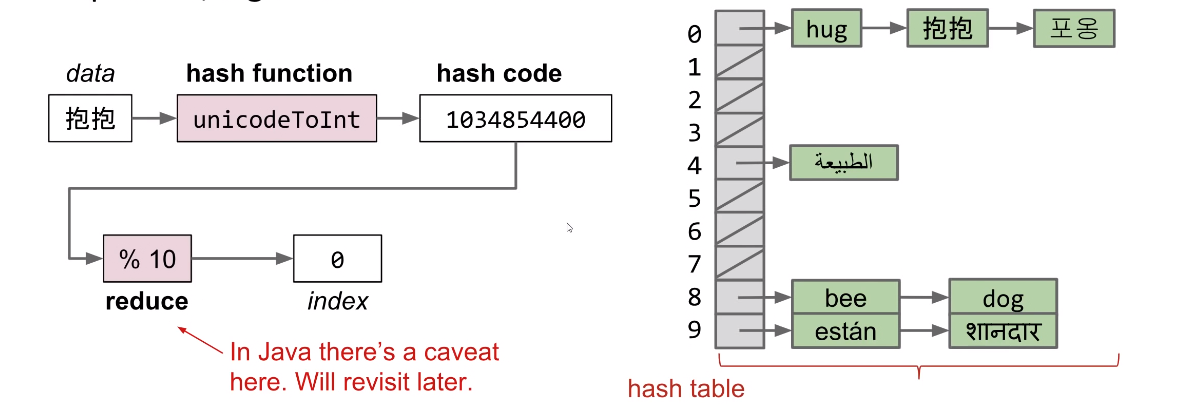
To improve it, we can use modulus of hahscode to reduce bucket count.
The data structure we’ve just created here is called a hash table.
- Data is converted by a hash function into an integer representation called a hash code
- The hash code is then reduced to a valid index, usually using the modulus operator.
Q: What’s the runtime of current hash table?
A: , where Q is the length of the longest list.
Improve performance of Hash Table
There are two ways to improve the performance:
- Dynamically growing our HashTable
- Improving our HashCodes
Dynamically growing the hash table
Suppose we have buckets and items. Then our load factor is . N Keeps increasing, so we need to increasing M to make our load factor lower.
For Example:
When is >= 1.5, then double M.
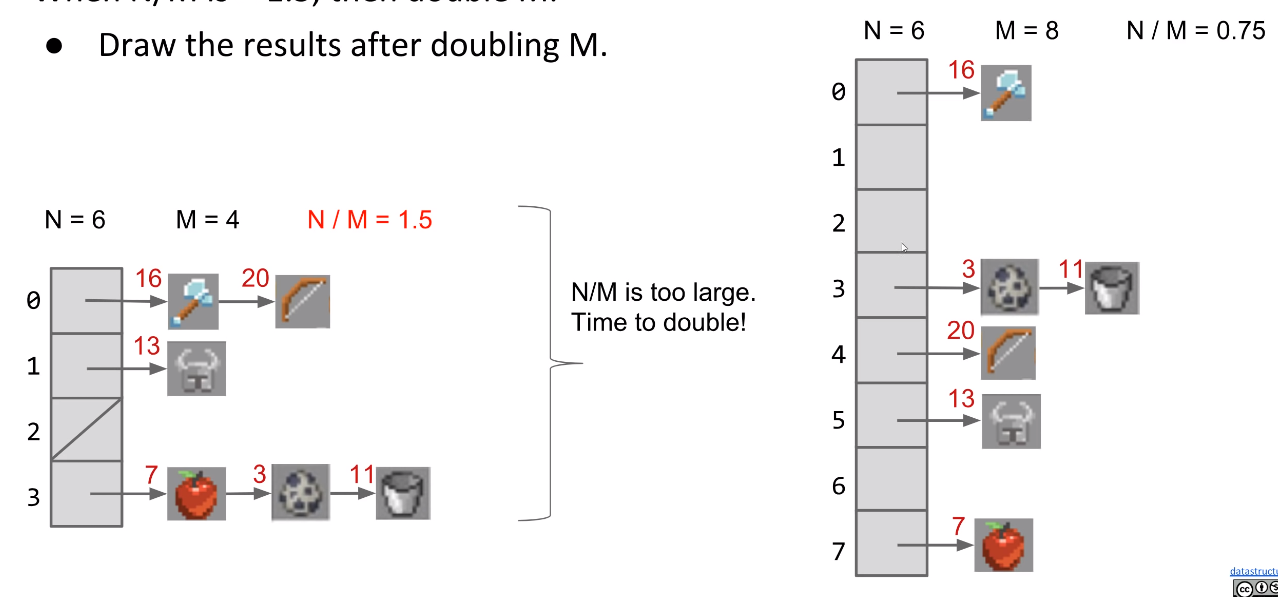
As long as M = , then = , Assuming items are evenly distributed, lists will be approximately long, resulting in runtimes.
But, one important thing to consider is the cost of the resize operation.
- Resizing takes time. Have to redistribute all items.
- Most add operations will be . Some will be time for resizing.
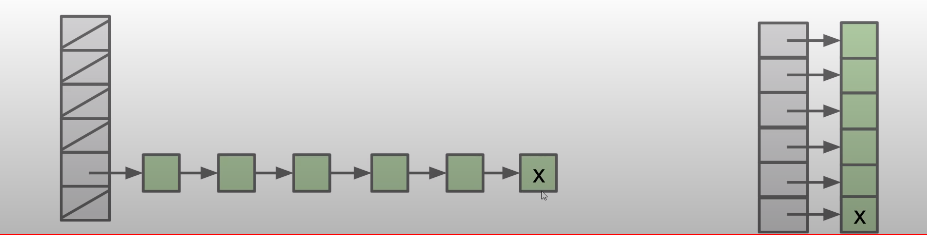
However, there still some flaws for resizing.
Both tables below have load factor of 1. But left table is much worse.
Good HashCode function
A typical hash code base is a small prime.
- Prime can avoid the overflow issue
- Lower chance of resulting hashCode having a bad relationship with the number of buckets
- Small prime is lower cost to compute.
Heap
Heap is a special data structure which is usually used to solve the priority queue problem.
- Priority queue: It is a ADT that optimizes for handling The maximum or minimum elements. Think about this scenario : We want to return the 10 tallest students in a big class. After we adding 10 students, when we add the 11th student, we remove the smallest one out to keep 10 students until we check all the students’ height.
Heap includes min-heap and max-heap. A heap has two properties:
- Min/Max heap: Every node is less/bigger or equal to both of its children
- Complete: Missing items only at the bottom level (if any), all nodes are as far left as possible
For Example:
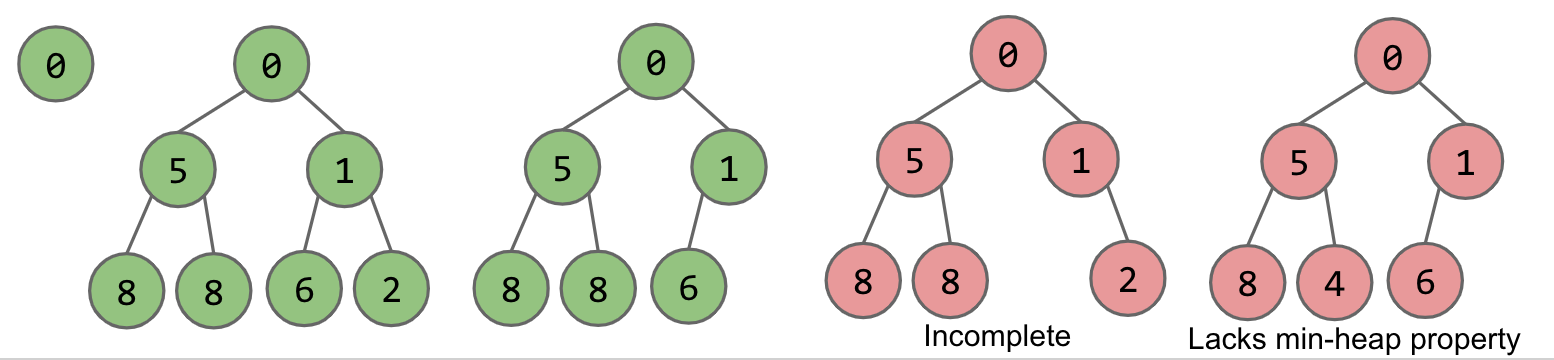
The green two three are heaps, and the red twos aren’t.
Heap Operations
Animated demo of below operations
Add
When we insert X into the following heap, the processing will be :
- Add to end of heap temporarily.
- Swim up the hierarchy to its right place.
getSmallest
The root is the smallest one. So return the item in the root node.
removeSmallest
- Swap the last item in the heap into the root.
- Sink down the hierarchy to the proper place.
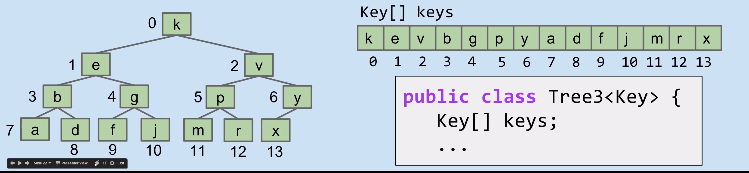
Heap Implementation
Due to heap hast the “complete” property. So we can number the tree from top to bottom and left to right. Then use an array to store the key which the index indicates the position of every node.
For convenient, offsetting everything by 1 spot.
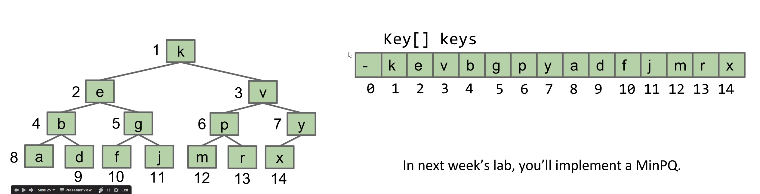
It makes computation of children/parent simply:
- leftChild(k) = k*2
- rightChild(k) = k*2+1
- parent(k) = k/2
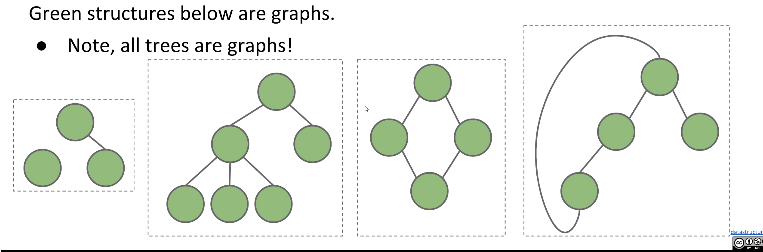
Graph
A graph consists of:
- A set of vertices (a.k.a nodes).
- A set of zero or more edges, each of which connects two nodes.
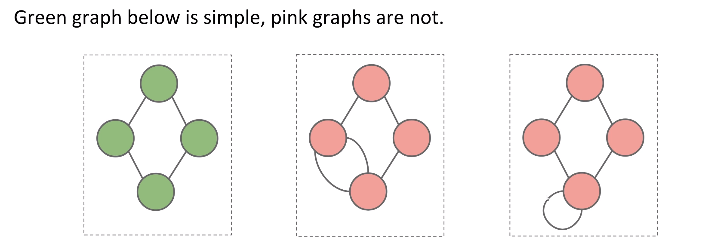
Simple Graph
A simple graph is a graph with:
- No edges that connect a vertex to itself, i.e. no “loops”
- No two edges that connect the same vertices, i.e. no “parallel edges”
More types and Terminology:
There are directed graphs, where the edge (u, v) means that the edge starts at u, and goes to v (and the vice versa is not true, unless the edge (v, u) also exists.) Edges in directed graphs have an arrow.
There are undirected graphs, where an edge (u, v) can mean that the edge goes from the nodes u to v and from the nodes v to u too.
There are also acyclic graphs. These are graphs that don’t have any cycles.
And then there are cyclic graphs, i.e., there exists a way to start at a node, follow some unique edges, and return back to the same node you started from.
- Graph:
- Set of vertices, a.k.a nodes.
- Set of edges: Paris of vertices.
- Vertices with an edge between are adjacent
- Vertices or edges may have labels (or weights)
- A path is a sequence of vertices connected by edges
- A cycle is a path whose first and last vertices are the same.
- Two vertices are connected if there is a path between them. If all vertices are connected, we say the graph is connected.
Graph Representations
- Adjacency Matrix
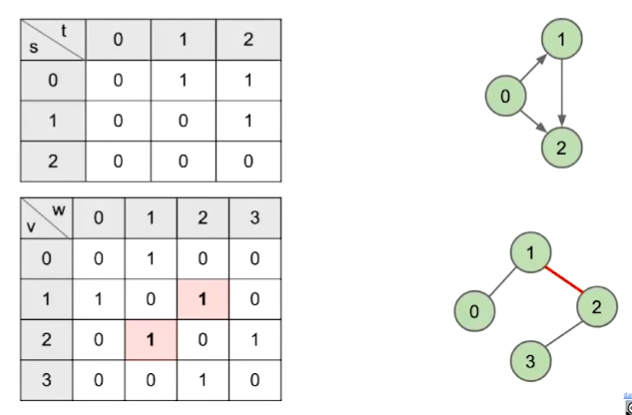
- G.adj(2) would return an iterator where we can call next() up to two times
- next() returns 1
- next() returns 3
- Total runtime to iterate over all neighbors of v is
- underlying code has to iterate through entire array to handle next() and hasNext() calls.
-
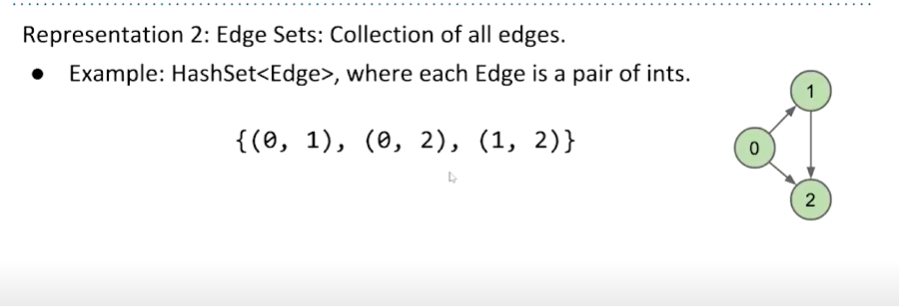
Edge Sets: Collection of all edges
-
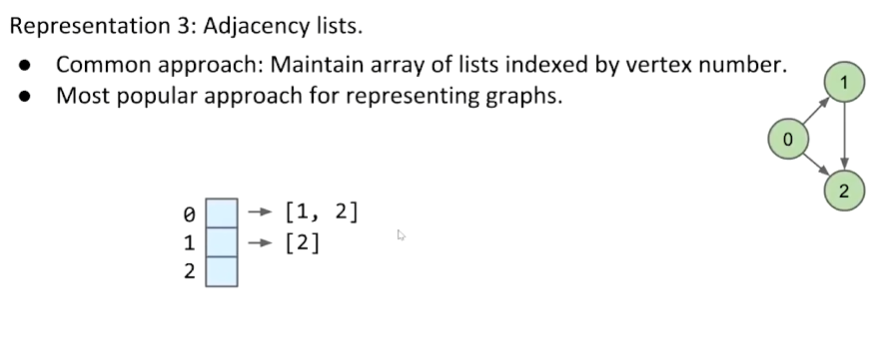
Adjacency lists
- Common approach: Maintain array of lists indexed by vertex number.
- Most popular approach for representing graphs.
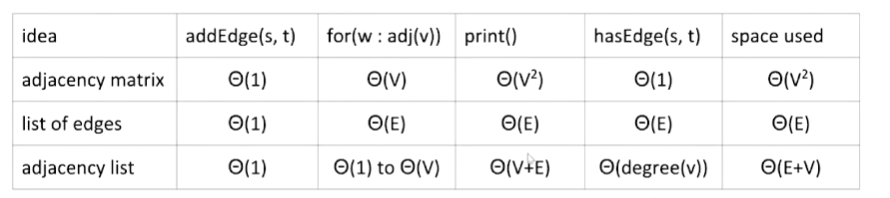
Runtime of some operations for each representation:
DFS & BFS
s-t Connectivity
write a function connected(s,t) that takes in two vertices and returns whether there exists a path between the two.
The process is that:
- Mark the current vertex.
- Does s==t? if so, return true.
- Otherwise, if connected(v,t) for any unmarked neighbor v of s, return true.
- Return false.
These slides shows the detail of above process
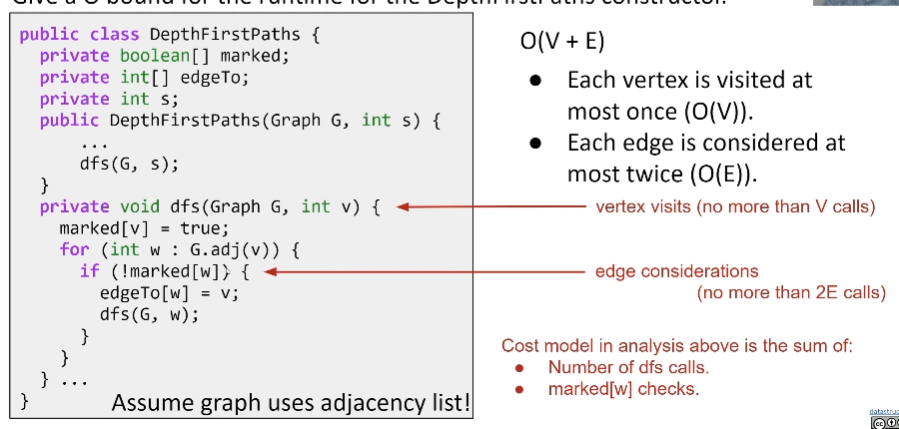
Depth First Traversal
Goal: Find a path from s to every other reachable vertex, visiting each vertex at most once. dfs(v) is as follows:
- Mark v.
- For each unmarked adjacent vertex w:
- set edgeTo[w] = v.
- dfs(w)
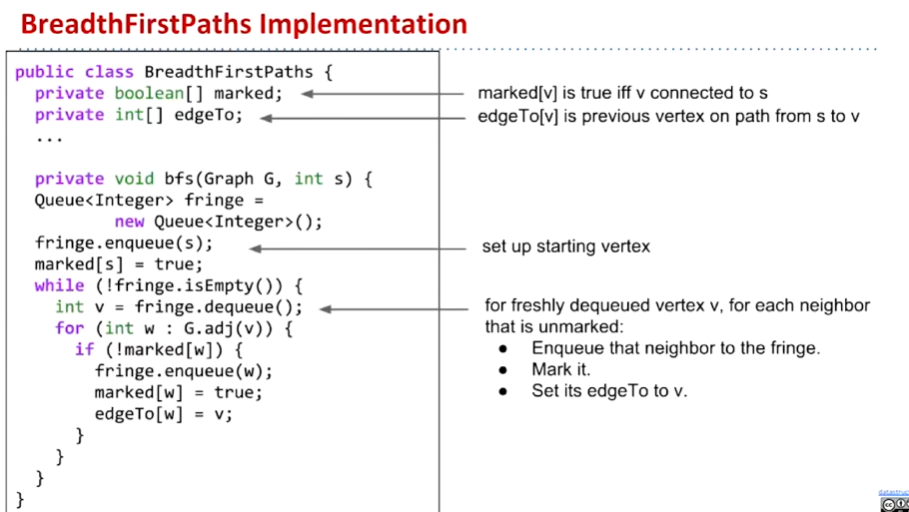
Breadth First Traversal
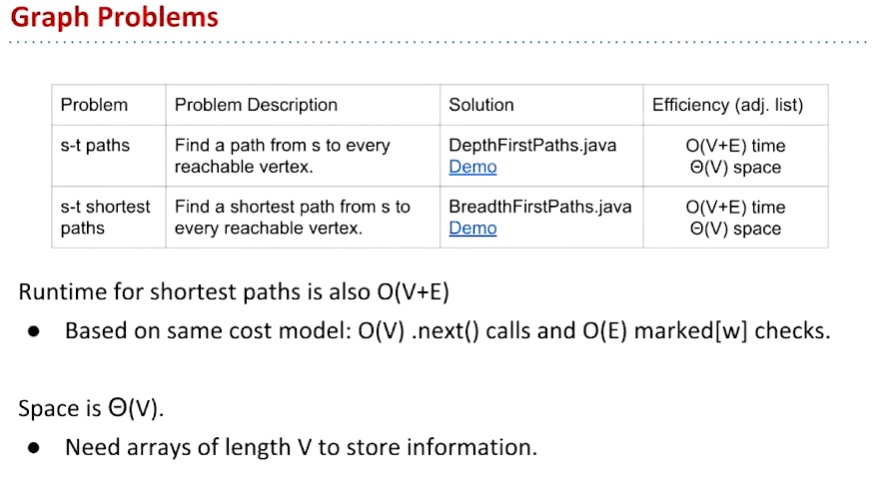
Summary of DFS and BFS
Dijkstra’s Algorithm
- Insert all vertices into fringe PQ (Priority Queue), storing vertices in order of distance from source.
- Repeat: Remove (closest) vertex v from PQ, and relax all edges pointing from v.
Dijkstra’s Algorithm Demo Link
Pseudocode
1 | def dijkstras(source): |
- Key invariants:
- edgeTo[v] is the best known predecessor of v.
- distTo[v] is the best known total distance from source to v.
- PQ contains all unvisited vertices in order of distTo.
- Important properties:
- Always visits vertices in order of total distance from source.
- Relaxation always fails on edges to visited (white) vertices.
A star algorithm
Minimum Spanning Trees
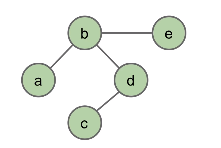
Spanning Trees
Given an undirected graph, s spanning tree T is a subgraph of G, where T:
- Is connected
- Is acyclic
- Includes all of the vertices
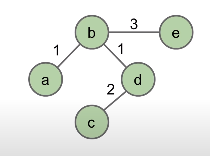
A minimum spanning tree is a spanning tree of minimum total weight
sometimes, the MST happens to be an SPT for a specific vertex.
Cut Property
- A Cut is an assignment of a graph’s nodes to two non-empty sets.
- A crossing edge is an edge which connects a node from one set to a node from the other set.
Cut property: Given any cut, minimum weight crossing edge is in the MST.
Proof:
Suppose that the minimum crossing edge were not in the MST. Since it is not a part of the MST, if we add that edge, a cycle wil be created. Then there must exists a crossing edge which crosses back over. Thus, we can remove and keep , and this will give us a lower weight spanning tree which is a contradiction.
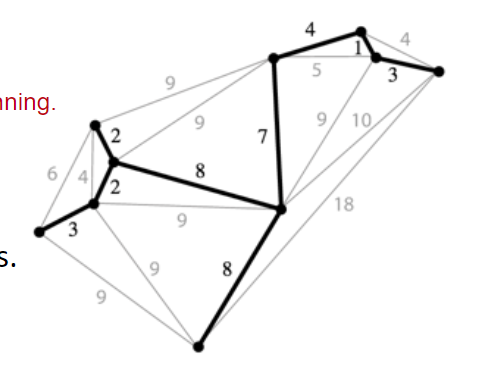
Prim’s Algorithm
Start from some arbitrary start node.
- Repeatedly add shortest edge(mark black) that has one node inside the MST under construction.
- Repeat until V-1 edges.
Prim’s Algorithm implementation (more efficient)
Use Priority Queue
Demo
runtime: O(V * log(V) + V * log(V) + E * log(V))
Kruskal’s Algorithm
Consider edges in order of increasing weight. Add to MST unless a cycle is created.
- Repeat until V-1 edges.
Kruskal’s Algorithm implementation
Use Priority Queue.
Demo
runtime: O(E logE)
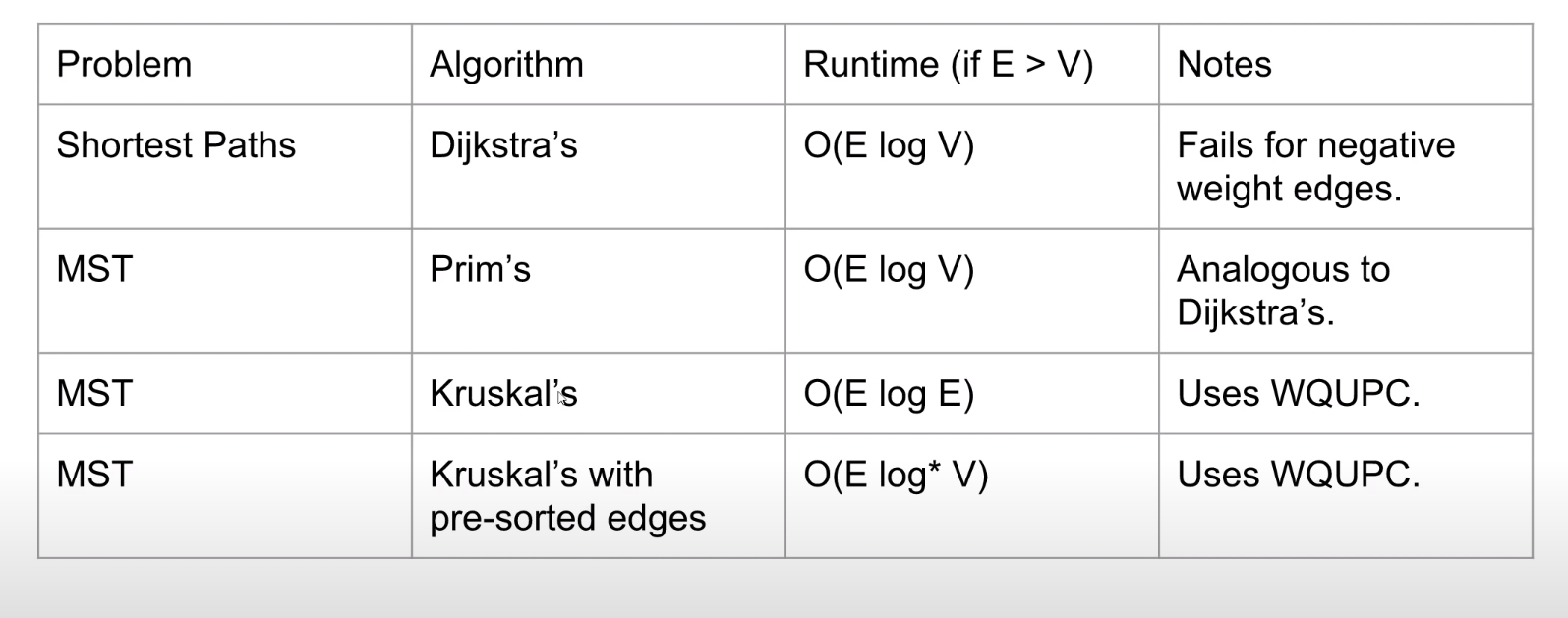
Shortest Paths and MST Algorithms Comparison
Range Searching
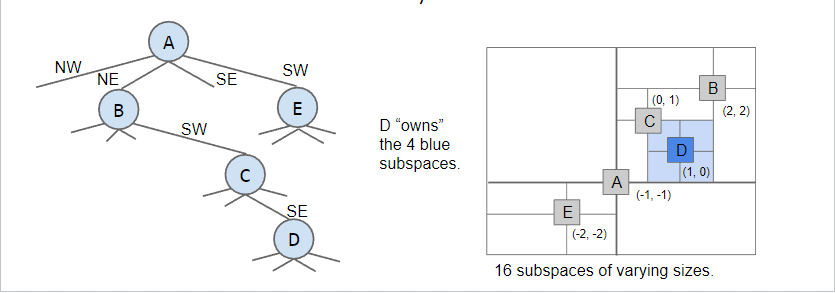
QuadTrees
Quadtrees are a form of “spatial partitioning”
- Quadtrees: Each nodes “owns” 4 subspaces
- Space is more finely divided in regions where there are more points
- Results in better runtime in many circumstances
Ranges Search using a QuadTree
K-D Trees
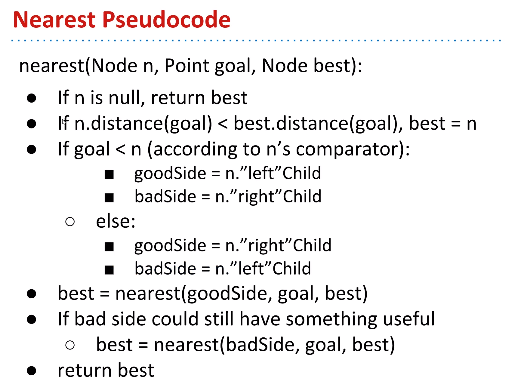
Nearest Neighbor using a K-D Tree
Pseudocode:
Trie
Tries are a very useful data structure used in cases where keys can be broken into “characters” and share prefixes with other keys (e.g. strings)
Suppose we have “sam”, “sad”, “sap”, “same”, “a”, and “awls” and construct a trie:
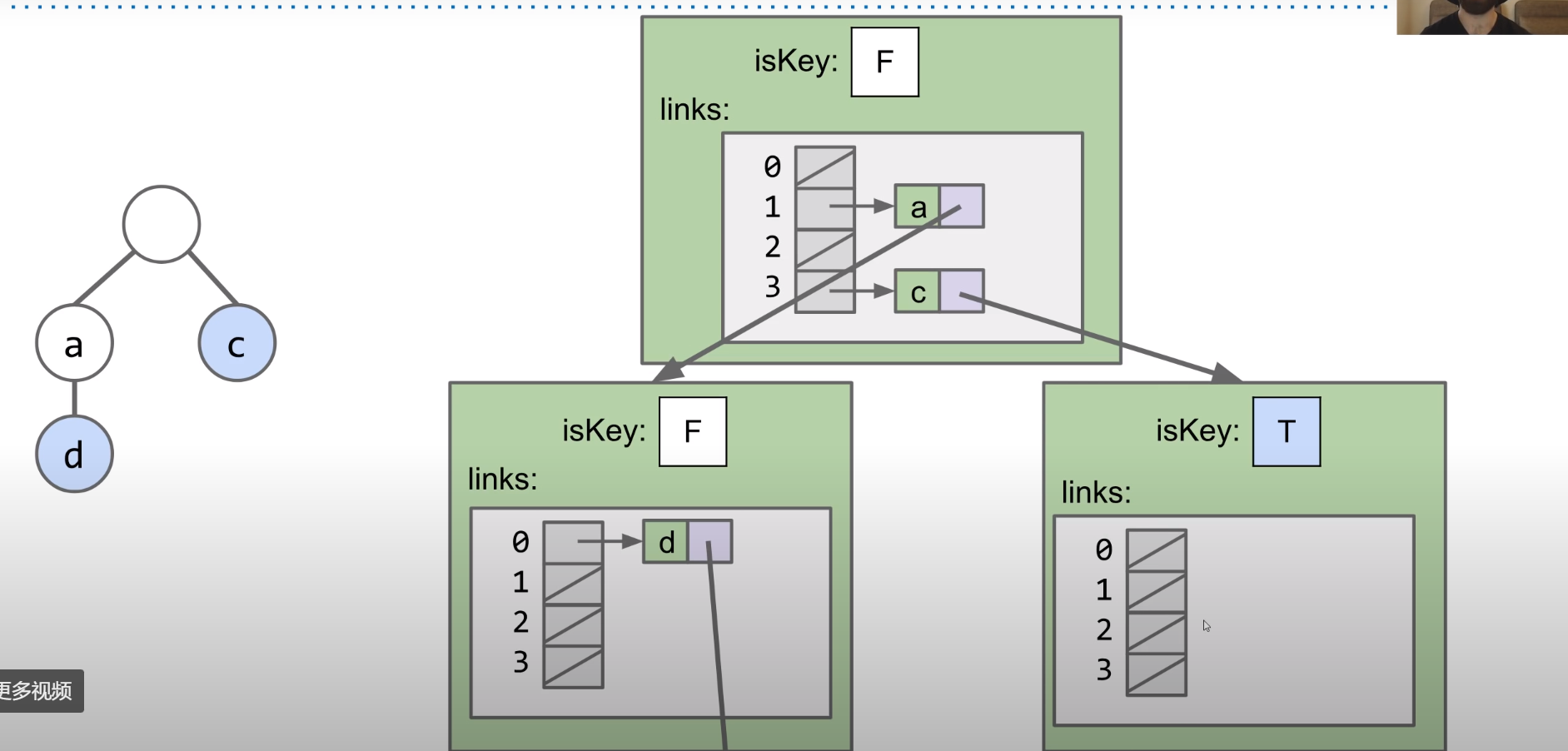
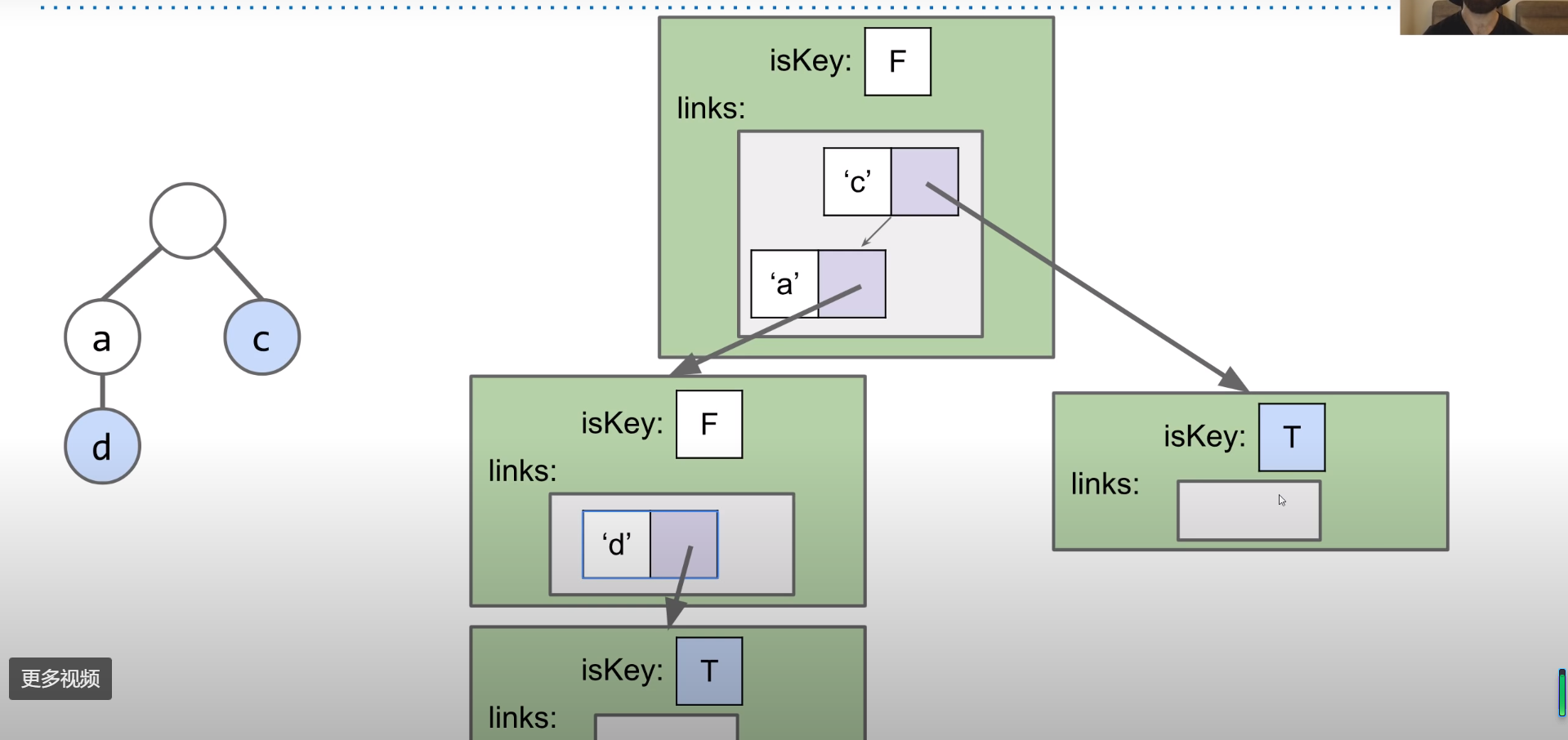
- Every node stores only one letter
- Nodes can be shared by multiple keys
It will be like:
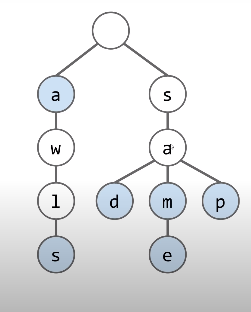
The blue nodes means the end of the key.
For example:
contains(“sa”) will be false cause “a” node is white which is not the end of a key.
contains(“a”) will be true, blue node.
The implementation of tries
The basic implementation of tries
- DataIndexedCharMap
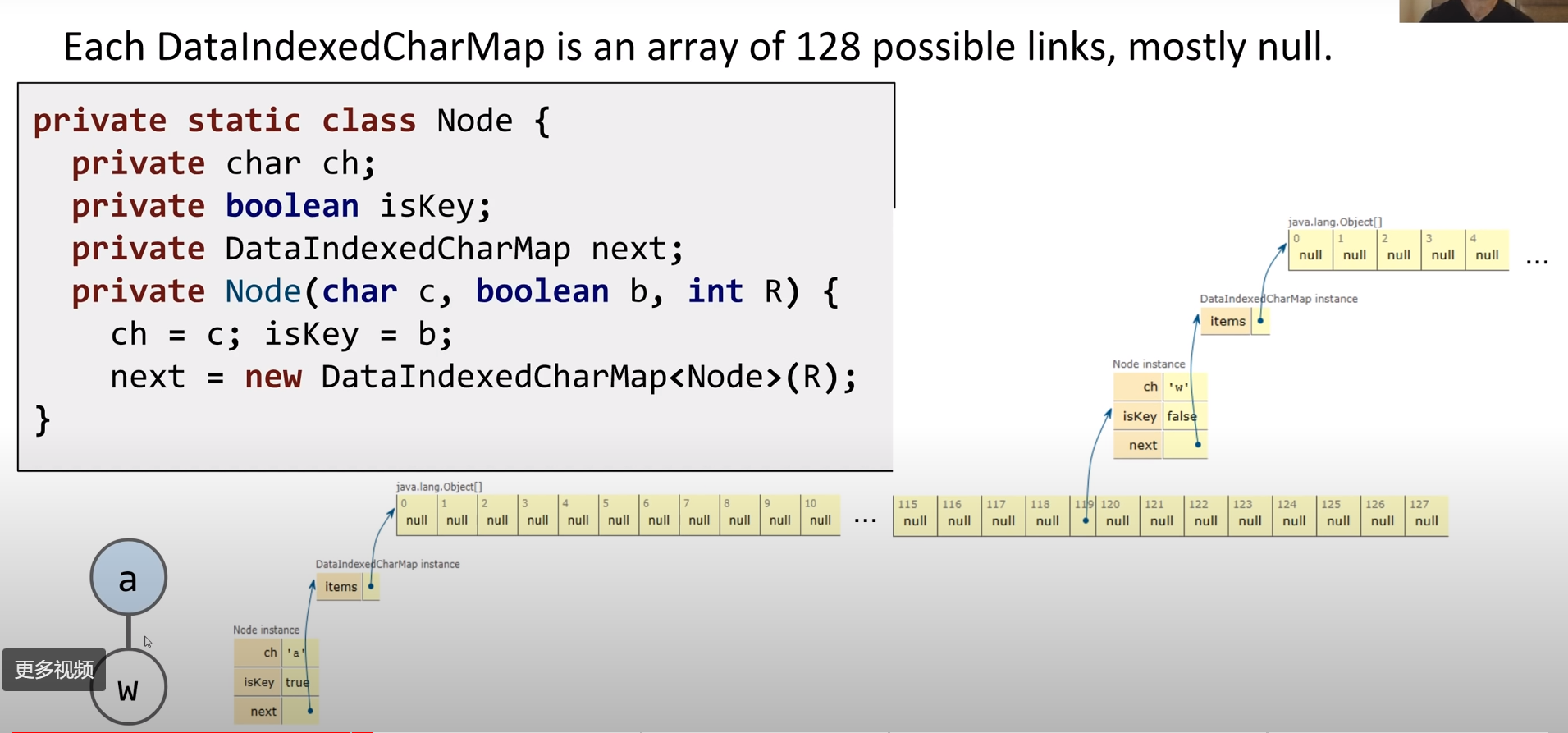
1 | public class TrieSet { |
- Hash-Table based Trie
Hash-Table based Trie. This won’t create an array of 128 spots, but instead initialize the default value and resize the array only when necessary with the load factor.
- BST based Trie
BST based Trie. Again this will only create children pointers when necessary, and we will store the children in the BST. Obviously, we still have the worry of the runtime for searching in this BST, but this is not a bad approach.
String Operations
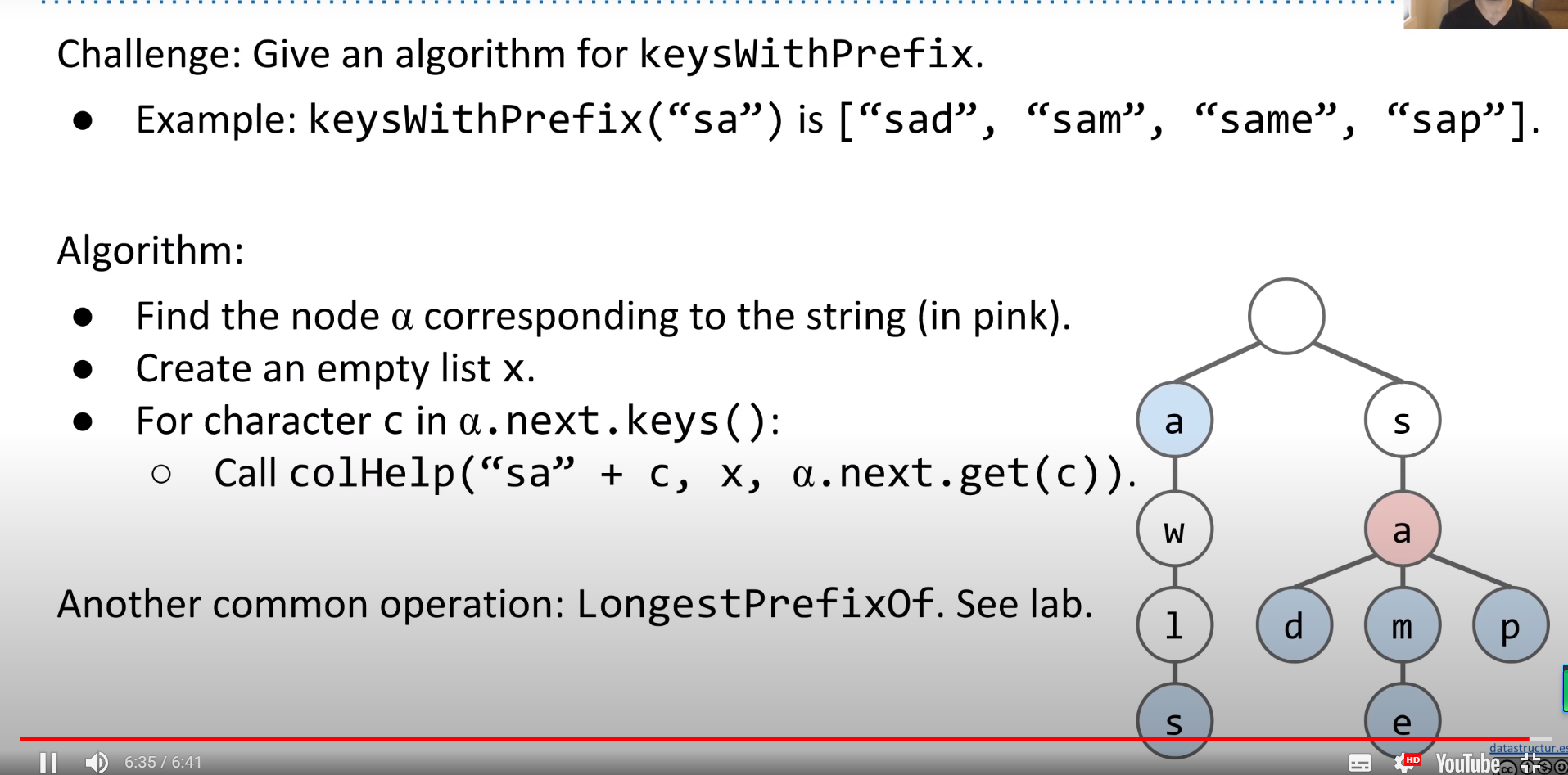
Prefix Matching
Tries can support many string operations efficiently.
Like keyWithPrefix, we can traverse to the end of the prefix and return all remaining keys in the trie.
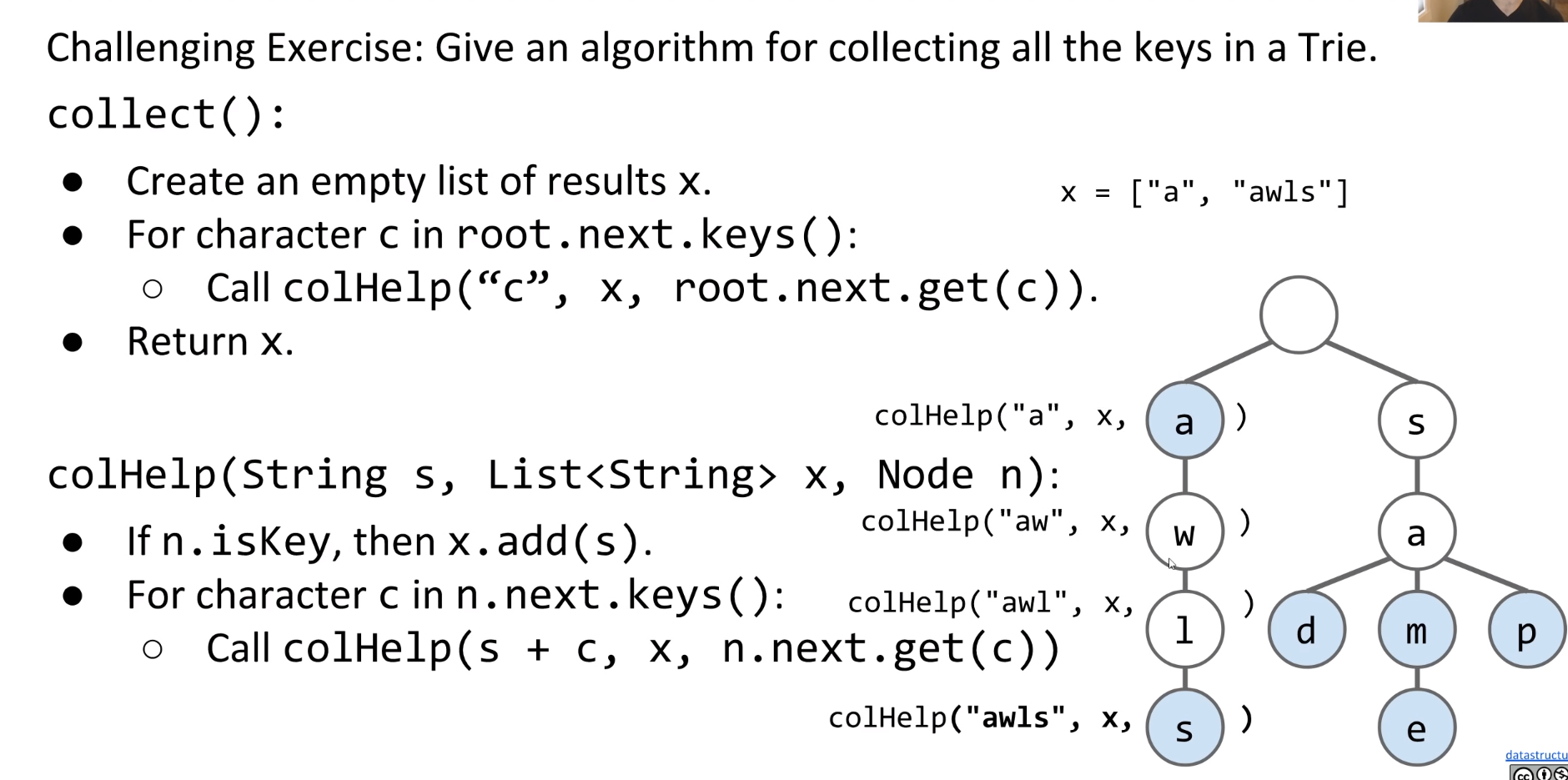
Let’s attempt to define a method collect which returns all of the keys in a Trie. The pseudocode will be as follows:
1 | collect(): |
KeyWithPrefix function will be :
1 | keysWithPrefix(String s): |
Autocomplete
When you type into any search browser, for example Google, there are always suggestions of what you are about to type.

One way to achieve this is using a Trie. We will build a map from strings to values.
- Values will represent how important Google thinks that string is
- Store billions of string efficiently since they share nodes.
- When a user types a query, we can call the method
keysWithPrefix(x)and return the top 10 strings
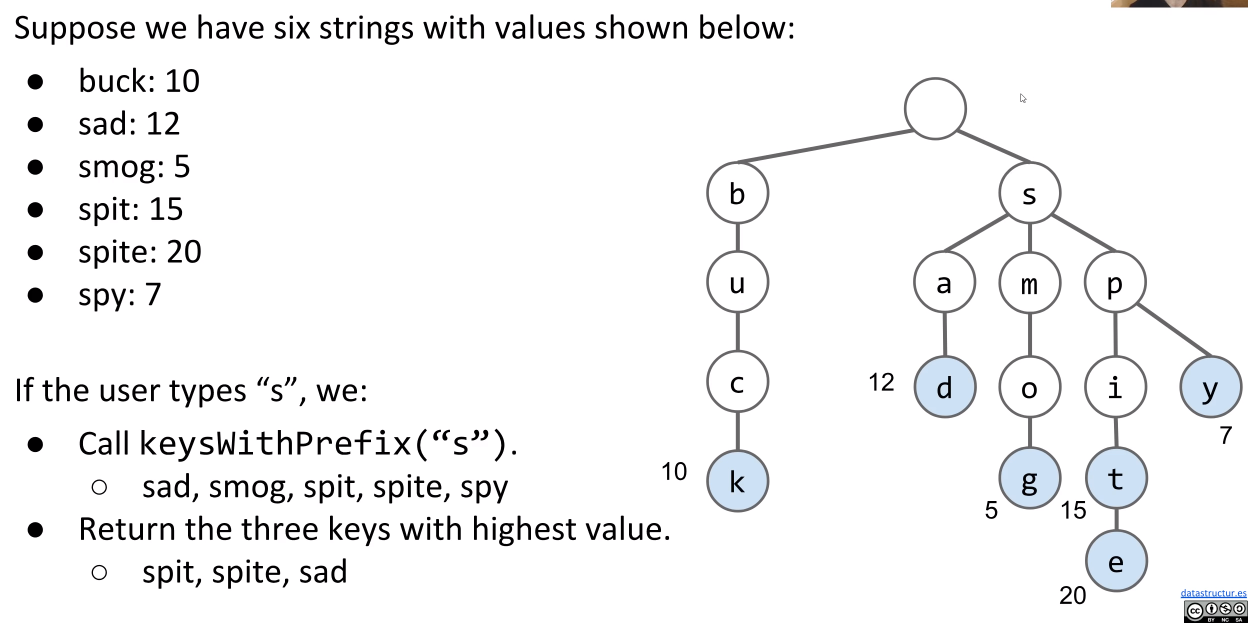
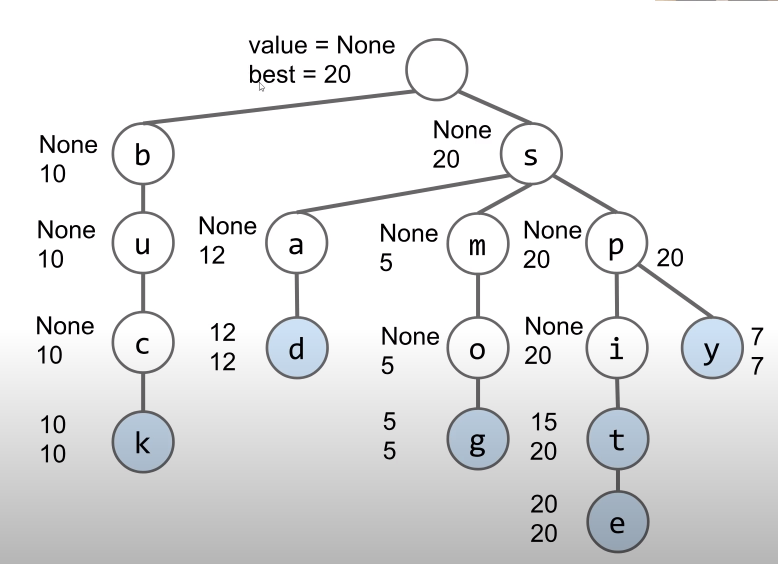
One major flaw with this system is if the user types in short length strings. The results will be huge amount. A possible solution to this issue is to store the best value of a substring in each node.
Topological Sort
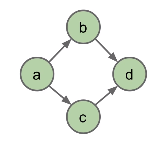
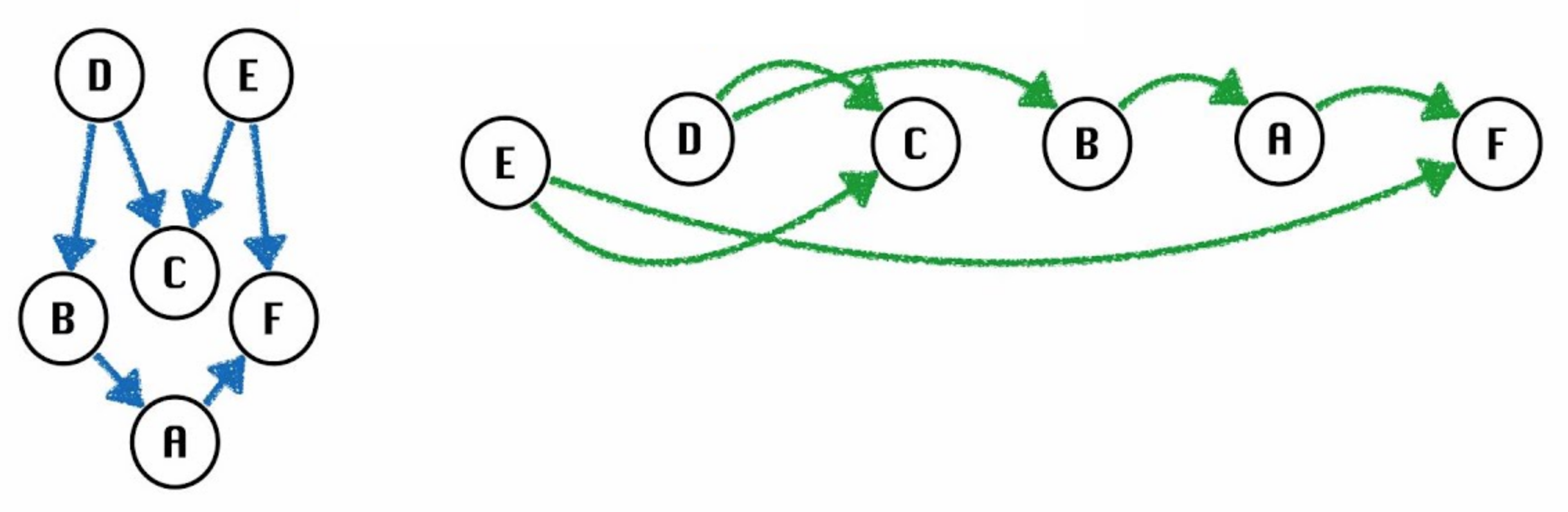
Suppose we have a collection of different tasks or activities, some of which must happen before another. How do we find sort the tasks such that for each task , the tasks that happen before come earlier in our sort?
We can first view our collection of tasks as a graph in which each node represents a task.
An edge indicates that must happen before . Now our original problem is reduced to finding a topological sort.
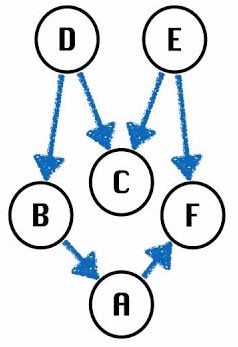
The Valid orderings include: [D,B,A,E,C,F], [E,D,C,B,A,F]
Note that topological sorts only apply to directed, acyclic (no cycles) graphs - or DAGs
Topological Sort: an ordering of a DAG’s vertices such that for every directed edge , comes before in the ordering.
For any topological ordering, you can redraw the graph so that the vertices are all in one line.
Topological Sort Algorithm
Topological Sort Algorithm:
- Perform a DFS traversal from every vertex in the graph, not clearing markings in between traversals.
- Record DFS postorder along the way.
- Topological ordering is the reverse of the postorder.
Pseudocode:
1 | topological(DAG): |
Runtime: where V and E are the number of nodes and edges in the graph.
Shortest Paths on DAGs
Use topological order we can deal with negative value.
- Visit vertices in topological order
- On each visit, relax all outgoing edges.
runtime:
Longest Paths Problem
Finding the longest path tree (LPT) from s to every other vertex. The path must be simple (no cycles!)
With DAGs, we can do:
- Form a new copy of the graph, called G’, with all edge weights negated (signs flipped).
- Run DAG shortest paths on G’ yielding result X
- Flip the signs of all values in X.distTo. X.edgeTo is already correct.